Autonome FPV-Drohne mit Companion-Computer und Sensorintegration
Projektbeschreibung
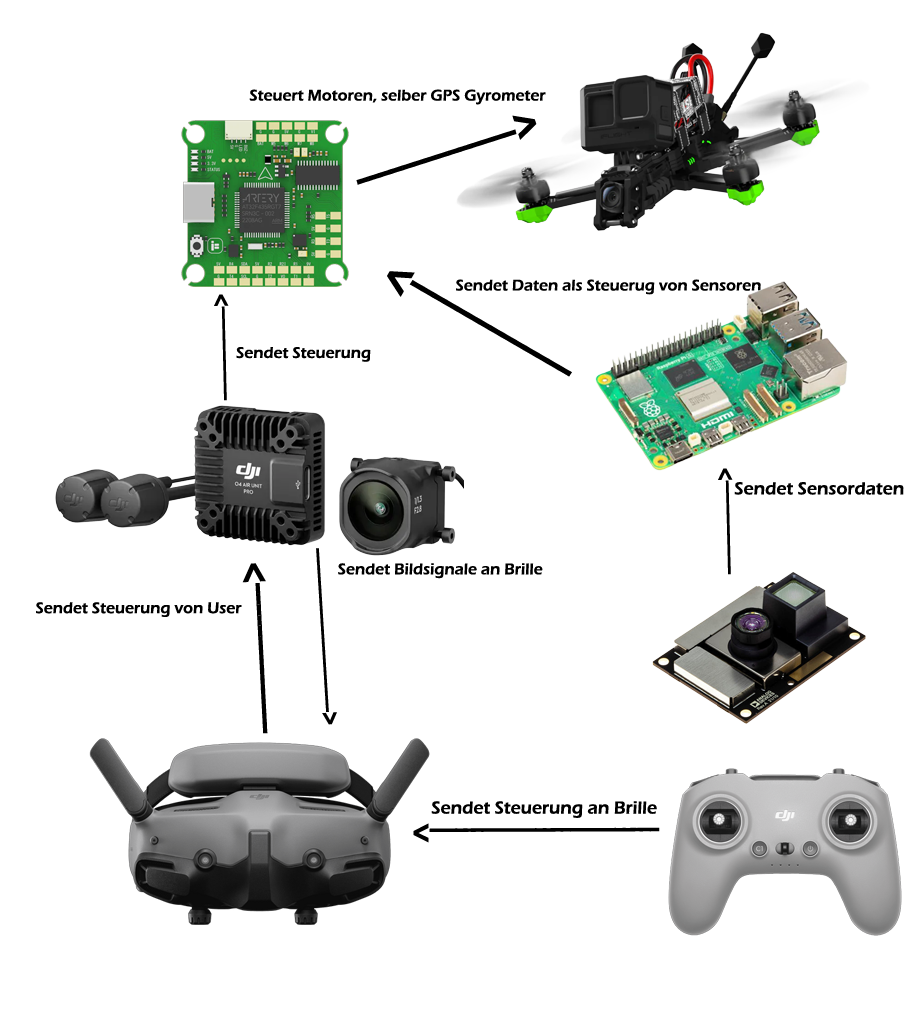
Ziel des Projekts ist die Entwicklung und Umsetzung einer teilautonomen FPV-Drohne, die sowohl manuell mit DJI Goggles 3 und DJI Remote Controller 3 gesteuert werden kann, als auch durch einen Raspberry Pi Teilautonome Flugfunktionen ausführt.
Die Basis bildet ein BNF-FPV-Drohnenmodell (z. B. iFlight Nazgul ECO) mit integriertem DJI O4 Air Pro Unit für digitale Videoübertragung. Die Flugstabilisierung erfolgt über den vorhandenen Flight Controller (BLITZ ATF435, Betaflight). Der Raspberry Pi wird als Erweiterung eingesetzt, um zusätzliche Algorithmen und Sensoren zu verarbeiten.
Geplante Features:
-
Crash-Safer: Notfallprozeduren zur Stabilisierung bei Kontrollverlust.
-
Position Hold: Beim loslassen des Steuer Controllers bleibt Drohne neutral an der Position.
-
Turtle Mode: automatisches Aufrichten der Drohne nach Crash.
-
Autopilot: automatische Flugsteuerung basierend auf Sensordaten (GPS, LiDAR, Ultraschall, Kamera mit YOLO).
-
Auto-Hover und Auto-Brake: Stabilisieren der Drohne an Ort und Stelle bzw. kontrolliertes Abbremsen.
-
Webinterface: Eingabe von Parametern (z. B. Gewicht, Schub, Flugstil) sowie Darstellung von Telemetrie und Flugpfaden.
-
Crash-Map: Speicherung und Visualisierung von Unfällen im Webinterface.
-
Flight Logging & Strichliste: automatische Auswertung der Flüge.
Projektziele
-
Aufbau und Inbetriebnahme einer FPV-Drohne mit DJI O4 Air Pro Unit.
-
Integration eines Raspberry Pi als Companion-Computer.
-
Entwicklung von Algorithmen für Autopilot, Auto-Hover und Auto-Brake.
-
Implementierung eines Webinterfaces zur Steuerung und Visualisierung.
-
Durchführung von Simulationen (Liftoff, Gazebo, Betaflight SITL) zur Minimierung von Hardware-Risiken.
-
Praxistests
Projektumfang / Abgrenzung
Umfang:
-
Hardware: FPV-Drohne, Flight Controller, O4 Air Pro Unit, Raspberry Pi, Sensoren (GPS, Ultraschall/LiDAR, Kamera).
-
Software: Betaflight/ArduPilot für Flight Controller, Companion-Software auf Raspberry Pi (Java/Python für YOLOv5 Modell), MAVSDK/MAVLink-Anbindung für Kommunikation zwischen Raspberry Pi und Flight Controller, Webinterface.
Abgrenzung:
-
Keine vollständige Neuentwicklung eines Flight Controllers (Verwendung vorhandener Hardware).
-
Fokus auf Kombination von Autonomie und FPV-Steuerung, nicht auf reinen FPV-Racing-Einsatz.
Erwartete Ergebnisse
-
Funktionsfähige hybride FPV-Drohne mit manueller und teilautonomer Steuerung.
-
Webplattform für Konfiguration und Flugdatenauswertung.
-
Dokumentierte Tests im Simulator und in realen Flügen.
-
Nachweis der technischen Machbarkeit von teil-gestütztem Autopilot auf Consumer-Hardware.
Visualisierung von Technologien
Visualisierung von Technologien
Backend: Java mit Quarkus, Lombok evtl Web Fluxes für Reactive Datenbank: PostGres um verschiedene Drohnen eines Accounts zu Managen bzw dort die Attribute ändern Frontend: Angular / React Router Versioning: Github mit Github Actions für Bildvergleiche für UI und Deployment auf Cloudflare Drohnen Tools: MavLink für Kommunikation zwischen Rasp und Flight Controller, Jolov5 Object Detection, BetaFlight \-\> Motoren steuerung, stabilisierung